Elements of dynamics in the essential processes of Life

Content:
Introduction
The key “cyberloop” of life
Time and control
– The evidence of time
– The art of control
Local trade of energy versus entropy – Dynamics
Particular Reference
Introduction
Life is a process that transcends the real.
It does so in three main ways:
- In practice, life violates the physical law of entropy.
- Life supports the imaginary.
- Thereby, life allows for value-oriented changes, by individual and collective means.
The page addresses these ways in a different sequence, starting with the most important point, and then commenting on more elementary aspects:
- General view of the key “cyberloop” of life, the cognitive process that keeps cognitive agents alive.
- Time and control
- Local trade of energy versus entropy
The key “cyberloop” of life
The “cyberloop” of life denotes here the key cognitive process of agents, natural or machine-based, that keeps them alive. This overall control loop, which monitors the real, estimates values, and as a consequence of possibly detected instant threats and opportunities, adapts the priority goals (strategic values) and associate models and cognitive processes.
Here is a general view of this cyberloop.
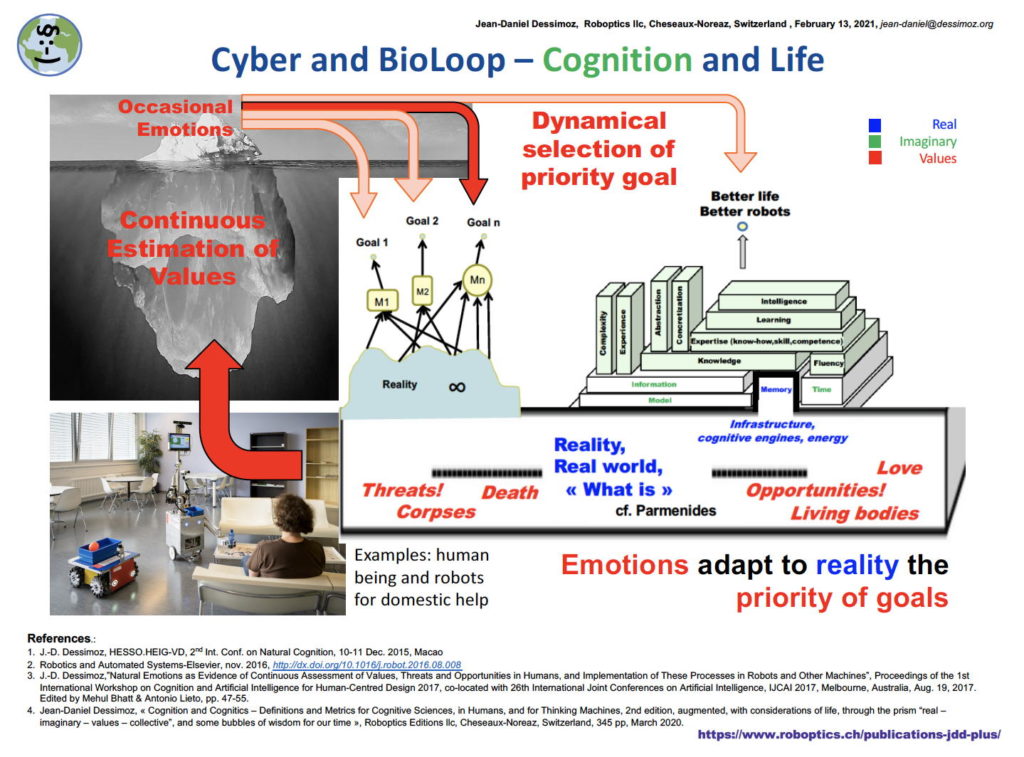
This poster (click here to download it, in pdf format ; ca. 1.2 Mb) and other documents can be downloaded, in French or English versions, from the given website (www.roboptics.ch/publications-jdd-plus).
Time and control
Control can be best understood and successfully implemented in the real, if the imaginary and multiple aspects of time are well considered and quantitatively taken into account.
In the real, the dual properties of permanence and change are evident, and this is the most basic dimension of time.
The imaginary allows to freely extrapolate changes, travel to the future, and sketch over there tentative goals. This may relate to a virtually infinite number of possibly attractive values, including long established, classical or brand-new ones.
The evidence of time
“Alot of water has flowed under the bridge”: here is an excellent case for the intuitive (axiomatic) definition of time. This is a common example, in the real, where the notion of time specifically denotes the duality of permanence and change; an amount of permanence (e.g. the age of the bridge) can be described by an amount of change (e.g. the amount of water flowed).
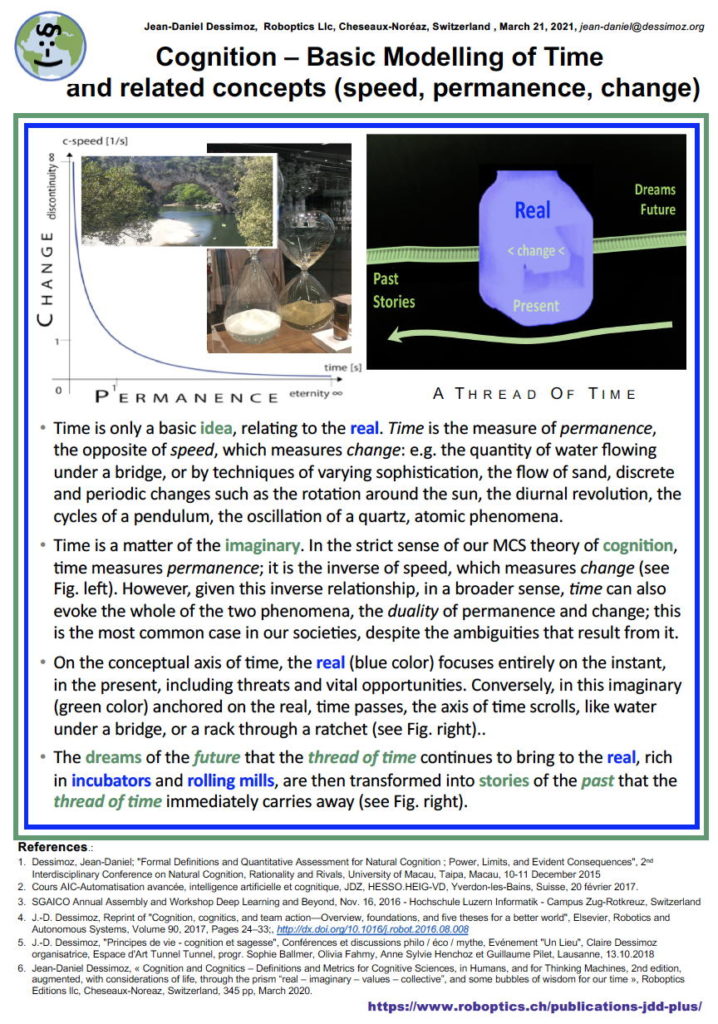
This poster (click here to download it, in pdf format ; ca. 1.4 Mb) and other documents can be downloaded, in French or English versions, from the given website (www.roboptics.ch/publications-jdd-plus). There is in particular a document of about thirty pages, centered on the concept of time; click here to download it.
The art of control
Control is a dynamic process that attempts to drive changes towards specific goals. In this endeavor, two classes of cognitive strategies may basically be defined. In the real, living beings as well as sophisticated machines typically make use of a cocktail of such strategies.
The first class of strategies for control relates to cases where actions are “one-way”, where goals can be successfully reached without any consideration of real, intermediary effects of these strategies. When feasible in practice, this approach is favored.
The second class of control strategies corresponds to more difficult cases, where appropriate actions are difficult to predict, i.e., where unforeseen errors and disturbances may occur, requiring adaptive (in a broad sense) control actions. Here, dynamic considerations dictate the selection of an appropriate subclass of strategies, among three possible choices:
- Full power; “on-off”, or “bang-bang” control. Here the perception of any deviation, no matter how small, of the plan, of the path towards the goal, leads to a full blown corrective action.
- Adaptive; “feedback” control. Here the current state of the matter is continuously monitored, including the effect of previous corrective actions, and this affects the elaboration of updated corrective actions, appropriately modulated. This is the core of classic control theories and somewhat extends the capabilities of a single controller (or agent) when the previous subclass fails.
- Hierachical; “cascade” control. Unfortunately, it is often the case that the agent cannot ensure a satisfactory control on his own, even with most sophisticated adaptive strategies. A collective approach must then be envisionned. Here, a certain autonomy can be granted to an auxiliary, more specialized system, to manage part of the task; or reciprocally, in agreement with an auxiliary, more general system to overview the context and circumstances of the task, a certain coordination can be ensured.
In all cases, control implies cognition, and a certain tropism to a future goal, i.e. more or less implicitly time, and the imaginary.
The imaginary has no limit, yet it is important to know that for control, for changing the real, the laws of physics cannot be escaped.
Thus for a concrete case, it is not an arbitrary decision (e.g. of a purely political, moral, or wishful nature) but the laws of the real that dictate which subclasses are applicable in practice, and which not. And fortunately, experience and scientifical evidence provide a simple criterion, time-related, to guide the selection of these precious control strategies.
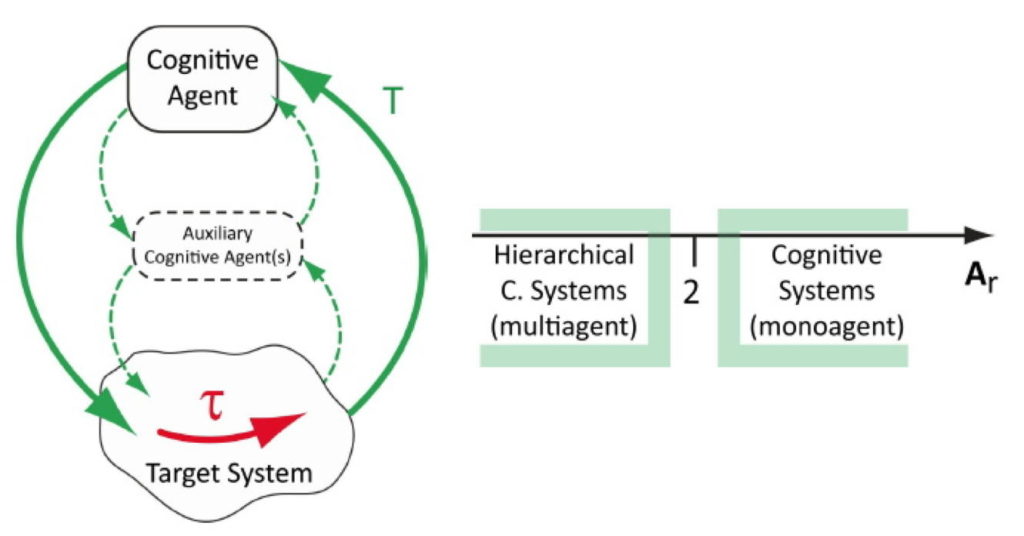
This figure is available in a poster (click here to download it, in pdf format ; ca. 165 Kb) and other documents can be downloaded, in French or English versions, from the given website (www.roboptics.ch/publications-jdd-plus).
The key criterion is the relative agility, Ar ratio, of the agility of the controller (the agent in control) versus the agility of the target system to be controlled. The agility is here the speed to react, the inverse of the time to react (T, tau).
For a simple, full power approach to have a chance to succeed, a fast agility is necessary on the control side (relative agility higher than twenty).
In the opposite case, for a comparatively slow control system (relative agility smaller than two), a hierachical approach is required, implying notably some autonomy of the subsystems, for managing their necessary, fast actions.
For the relatively small range of intermediate cases (Ar between 2 and 20), it is necessary, if possible, to change the structure of the system, to accelerate the control or to slow down the target system; or else to resort to one or the other of the various classic techniques in automatic control, starting with a prudent corrective action, proportionate to the intensity of the perceived deviations.
Local trade of energy versus entropy – Dynamics
According to the classical laws of physics, entropy can only increase. Intuitively speaking, this means that disorder keeps growing. This is globally true.
Nevertheless, science and experience also indicate that at the expense of a certain amount of energy, locally, i.e. in a restricted domain, a certain order and structure can be established, entropy can be reduced.
This is precisely what life and controllers, notably, can achieve.
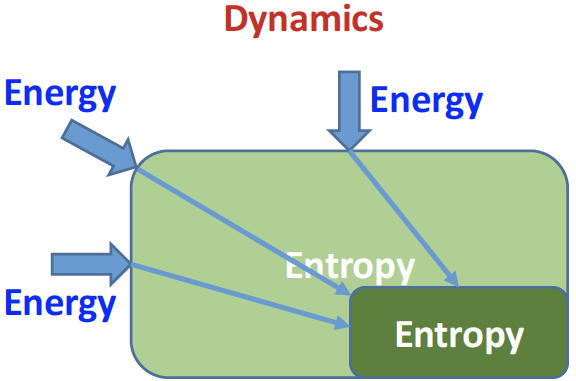
This figure is available in a poster (click here to download it, in pdf format ; ca. 122 Kb) and other documents can be downloaded, in French or English versions, from the given website (www.roboptics.ch/publications-jdd-plus).
Dynamics is here the appropriate word, as it primarily links the concepts of energy and changes as time goes. Many interesting notions appear in this context, namely work, force, motion, displacement, power, change, speed, control and entropy.
Etymology shows that the word “dynamics“ stems from the Ancien Greek “dúnamis”, usually translated as “power”. Physics define power as the change in energy that can be performed in one time unit, i.e. in one second. In thermodynamics, work is energy, and the rate, the speed at which work is performed, is power.
Motions provide an intuitive way to describe energy (i.e. also work); thus, energy is the product of a force by a displacement.
In a more abstract and general way, energy (i.e. also work), can be equivalently defined as the product of a cause, by its effect.
Coming back to the notion of power, we notice that energy is also the product of a power by time, that is to say implicitly that the power is the cause of a change, and the time, the duration of this work.
Thus control, and more generally, life, use energy to orient changes towards an arbitrary goal, thereby reducing entropy in a certain domain.
Particular reference:
Jean-Daniel Dessimoz, « Cognition and Cognitics – Definitions and Metrics for Cognitive Sciences, in Humans, and for Thinking Machines, 2nd edition, augmented, with considerations of life, through the prism “real – imaginary – values – collective”, and some bubbles of wisdom for our time », Roboptics Editions llc, Cheseaux-Noreaz, Switzerland, 345 pp, March 2020.
To know more about Cognition and Cognitics, click here.
Work in progress! The present site is now up and running, but there are still a few nuggets that deserve to be taken over from our previous websites, which have become secondary: cognitics.org, cognitics.populus.org .